Masse: Unterschied zwischen den Versionen
(→Additivität und Äquivalenz von Masse und Energie) |
(→Eigenschaften und Beziehungen zu anderen Größen) |
||
| Zeile 20: | Zeile 20: | ||
| <math>E_0 \, / \, \mathrm{J}</math> | | <math>E_0 \, / \, \mathrm{J}</math> | ||
| [[Energie|Ruheenergie]] | | [[Energie|Ruheenergie]] | ||
| + | |- | ||
| + | | <math>E_{kin} = \dfrac{1}{2} m \, v^2</math> | ||
| + | | Kinetische Energie | ||
|- | |- | ||
| <math>c \approx 300 \cdot 10^6 \, \mathrm{\dfrac{m}{s}}</math> | | <math>c \approx 300 \cdot 10^6 \, \mathrm{\dfrac{m}{s}}</math> | ||
Version vom 21. April 2019, 18:07 Uhr
S. Burghardt (04.2019) MINTwiki.de/Masse

| Physikalische Größe | |
|---|---|
| Name | Masse |
| Formelzeichen | |
| SI-Einheit | Kilogramm |
| Einheitenzeichen | Basiseinheit |
Die Masse (engl. mass) ist eine grundlegende Eigenschaft von Materie und eine physikalische Basisgröße des SI-Systems. Die Quantität der Masse wird in der Einheit kg (Kilogramm) gemessen, die (derzeit noch) durch das Urkilogramm festgelegt ist. Das ist ein Zylinders aus Platin-Iridium, welcher vom Internationalen Büro für Maß und Gewicht verwahrt wird. Genaugenommen verkörpert dieser Block eine Ruhemasse von 1 kg, denn bei der Betrachtung der Masseeigenschaften muss man die klassische mechanische von der relativistischen Beschreibung unterscheiden.
Die Masse entfaltet zweierlei physikalische Wirkungen, Trägheit und Gravitation. Dementsprechend unterscheidet man träge und schwere Masse, die nach dem Äquivalenzprinzip gleichzusetzen sind.
Ferner sollte man die Masse von Begriff Gewicht abgrenzen. Auf der Erde nimmt man i.d.R. eine konstante Gravitation an, wodurch die Masse näherungsweise proportional zur Gewichtskraft ist. Daraus folgt dann, dass man die Masse hier z.B. mit einer Federwaage bestimmen kann. Somit wäre der Begriff des Gewichts vom äußeren Gravitationsfeld abhängig. Die Masse ist es nicht.
Inhaltsverzeichnis
Eigenschaften und Beziehungen zu anderen Größen
Invarianz gegenüber Bezugssystemen
Die Masse wird sowohl von der klassischen Physik als auch unter Berücksichtigung relativistischer Theorie als Invariante betrachtet. Ein Körper hat also in jedem Bezugssystem die gleiche Masse, die sich durch Transformation (Galilei- respektive Lorentz-Transformation) nicht ändert.
| Ruheenergie | |
| Kinetische Energie | |
| Lichtgeschwindigkeit | |
| Kraft | |
| Impuls |
Additivität und Äquivalenz von Masse und Energie
In der klassischen Physik ist die Summe der Massen zweier Körper gleich der Masse eines aus diesem Massen zusammengefügten Körpers. Der innere Energiezustand der Massen wird hier nicht berücksichtigt, da dieser in der klassischen Betrachtung mit der Masse nichts zu tun hat. Demgegenüber ist die Äquivalenz von Masse und Ruheenergie, , ein im Rahmen der speziellen Relativitätstheorie entdecktes Naturgestz:
Dabei ist die Lichtgeschwindigkeit, , eine Naturkonstante und die obenstehende Gleichung ist zugleich die moderne Defininitionsgleichung der Masse bzw. Ruhemasse. Das heißt, dass eine Änderung der inneren Energie eines Körpers, z.B. durch Erwärmung, auch theoretisch dessen Masse verändert. Das hat nun auch Auswirkungen auf die Additivität, da ein Zusammenfügen zweier Körper eine Einfluss auf innere Bindungsenergien sowie die kinetische Energie einzelner Teilchen hat, welche zum System gehören.
Trägheit
{kind=link}
Nach dem ersten Newtonschen Axiom verbleibt ein Körper in Ruhe oder gleichförmiger Bewegung, sofern er nicht durch einwirkende Kräfte zur Änderung seines Zustands gezwungen wird. In dieser Beziehung ist die Trägeheit des Körpers ein Maß des Widerstands eines Körpers gegen die Änderung seines Bewegungszustandes. In der klassichen Mechanik ist die Geschwindigkeitsänderung (Beschleunigung) von der Ausgangsgeschwindigkeit unabhängig:
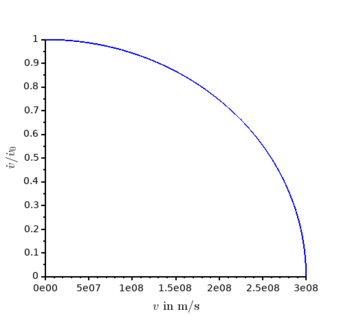
Damit würde sich ein Körper theoretisch bis zu einer unendlichen Geschwindigkeit beschleunigen lassen. Da die Lichtgeschwindigkeit aber die höchste theoretische Geschwindigkeit ist, ist das nicht möglich. Für hohe Geschwindigkeiten gilt obenstehende Gleichung, wenn man eine geschwindigkeitsabhängige relativistische Masse einsetzt:
Für wird also die Trägheit unendlich, was letztlich die Beschleunigung begrenzt (Abb. 1). Für ist der Fehler von Newtons Gleichung vernachlässigbar, weshalb sie in den meisten technischen Anwendungen verwendet wird. Ein Fehler von 1 ‰ wird erst bei über 13 Mio m/s überschritten.
Impulserhaltung
Der Kraftstoß ist die kumulierte Kraft eines betrachteten Vorgangs, der einer Impulsänderung entspricht. Das zweite Newtonsche Axiom kann man daher auch mittels des Impulses schreiben:
Damit ergibt sich der Impuls als eine der Geschwindigkeit proportionale Größe die dementsprechend innerhalb eines Inertialsystems eine Erhaltungsgröße ist (erstes newtonsches Axiom):
Betrachtet man nun zwei interagierende Massen die durch einen vollständig inelastischen zentrischen Stoß verbunden werden, so ist folglich deren Impulssumme konstant. Die Summe der Massen und deren vektoriell addierte Geschwindigkeit (Galilei-Transformation) ergibt somit den Gesamtimpuls des abgschlossenen Systems:
Das ist der klassische Impulserhaltungssatz, der allerdings nur für kleine Geschwindigkeiten anzuwenden ist, da ansonsten die einzelnen Geschwindigkeiten mittels Lorentz-Transformation auf einen beliebigen Beobachter umzurechnen sind. Letztlich ergibt sich damit die Gültigkeit des klassischen Impulserhaltungssatzes, wenn man statt der Ruhemasse die oben bereits diskutierte relativistische Masse einsetzt:
Gravitation
In der klassixchen Mechanik wird die Gravitation als eine gegenseitige Anziehungskraft von zwei Massen beschrieben, die in Richtung der sie verbindenden Schwerpunktachse wirkt:
Hier ist eine Naturkonstante und der Abstand der beiden Massenschwarpunkte. Man kann also aus jeder Masse ein Kraftfeld ableiten, das man Gravitationsfeld nennt und damit eine räumlich verteilte Gravitationsbeschleunigung begründet - auf der Erde entspricht diese der Fallbeschleunigung, .
Dichte, Volumen und Massenmodelle
Die Dichte (oder besser Massendichte) ist ein Begriff aus der Kontinuumstheorie und damit ein Potentialfeld im Raum. Für ein abgeschlossenes Volumen, , ergibt sich die Masse:
Im physikalischen Sinn kann jeder Masse ein Volumen zugeordnet werden. Gerade in der Ingenieurwissenschaft kann es allerdings zweckmäßig sein, die Masse als Flächen- oder Liniendichte zu definieren, die als Modell für eine dünne Platte resp. einen Balken dient. Für dynamische Berechnungen verwendet man häufig das Modell einer Punktmasse im Schwerpunkt eines starren Körpers.
Messung
Da man auf der Erde ein näherungsweise homgenes Gravitationsfeld vorfindet, kann die Masse eines makroskopischen Körpers durch Messung der Gewichtskraft mittels einer Waage bestimmt werden. Hier kann man eine direkte und indirekte Wägung unterscheiden. Bei der Balkenwaage kann man eine Masse direkt mit einer Referenzmasse vergleichen, wobei man sich das Hebelgesetz zunutze macht:
Bei der indirekten, heute bei weitem dominierenden Methode, das ist die Waage ein Kraftmesser, der mittels Referenzmassen kalibriert wird.